ACC-Automated Car Following Model #
ACC is short for “Adaptive cruise control”. It is a control model based on acceleration. It has the following formula:
$$a_{AV} (t) = k_1 (g(t) - \tau v_{AV}(t)) + k_2 \Delta v$$
Functions #
$a_{AV} (t)$: function of the acceleration of the ACC vehicle (which is following another vehilce), with respect to time$g(t)$: function of the gap between the two vehicles (the position of the preceeding vehicle minus that of the ACC vehicle) with respect to time$v_{AV}(t)$: function of the ACC vehicle’s speed with respect to time.
Parameters #
$k_1 = 0.23 s^{-2}$(What does$s^{-2} mean?$)$k_2 = 0.07 s^{-1}$$\tau$, safety time gap between the two vehicles
Example #
Let’s consider the following example:
The preceding vehicle is cruising at 30m/s speed for the first 10 seconds, then decreasing to
$10 m/s$with deceleration$−2𝑚/𝑠^2$and then accelerating to 30m/s with acceleration$2𝑚/𝑠^2$. The initial speed of the following ACC vehicle is 30m/s.
$\tau = 1.1s$
Initial spacing is
$20m$
Based on the above settings, we want to plot the trajectory of the two vehhicles.
using Plots# Planned Trajectory
v_cruise = 30 # m/s
t_cruise = 10 # first 10 seconds
a_decel = -2 # m/s^2
a_accel = 2 # m/s^2
init_space = 50 # initial spacing is 50 m
init_acc_v = 30 # initial acc speed is 20 m/s
k1 = 0.23
k2 = 0.07
# speed when deceleration stops
v_decel_end = 10
# how much time the preceeding vehicle decelerates
t_decel = (v_cruise - v_decel_end)/abs(a_decel)
# speed when deceleration stops
v_accel_end = 30
# how much time the preceeding vehicle accelerates
t_accel = (v_accel_end - v_decel_end)/abs(a_accel)
time_interval = 0.2
time_span = 0.0:time_interval:30
safety_time_gap = 1.11.1
function traj(t)
"""This function defines the trajectory of the preceeding vehicle
- v_p: the speed of the preceeding vehicle
- x_p: the distance the preceeding vehicle has travelled
"""
if t <= t_cruise
v_p = v_cruise
x_p = init_space + v_cruise * t
elseif t <= t_cruise + t_decel
v_p = v_cruise + a_decel * (t - t_cruise)
# I used calculs to do this:
# from 10s to 20s, the speed w.r.t time is v(t) = 30 - 2t
# The integral of v(t) is the distance w.r.t time: S(t) = -t^2 + 30t + c
# since S(0) = 0, so c = 0
# therefore, S(t) = -t^2 + 30t
# to be more general, 30 should be v_cruise here
x_p = init_space + v_cruise * t_cruise - (t-t_cruise)^2 + v_cruise * (t - t_cruise)
elseif t <= t_cruise + t_decel + t_accel
v_p = v_decel_end + a_accel * (t - t_cruise - t_decel)
# I used calculs to do this:
# from 20s to 30s, the speed w.r.t time is v(t) = 10 + 2t
# The integral of v(t) is the distance w.r.t time: S(t) = t^2 + 10t + c
# since S(0) = 0, so c = 0
# therefore, S(t) = t^2 + 10t
# to be more general, 10 should be v_decel_end here
x_p = init_space + v_cruise * t_cruise - t_decel^2 + v_cruise * t_decel + (
t - t_cruise - t_decel)^2 + v_decel_end * (t - t_cruise - t_decel)
end
return (v_p, x_p)
endtraj (generic function with 1 method)
function traj_acc(t, safety_time_gap = safety_time_gap)
"""This function definds the trajectory of the acc vehicle
"""
# initialize at timestamp 0.0
v_p, x_p = traj(0)
x_av = 0
v_av = init_acc_v
a_av = k1*((x_p - x_av) - safety_time_gap*v_av) + k2 * (v_p - v_av)
# if t == 0, return the initial result
if t == 0
return (x_av, v_av, a_av)
# otherwise, use for loop for calculation
else
for i in time_interval:time_interval:t
# the first is 0.2, then 0.4, 0.6...
v_p, x_p = traj(i)
# calculate
v_av_prev = v_av
v_av += time_interval*a_av
## HOW?
x_av += 0.5*(v_av + v_av_prev)*time_interval + time_interval^2 * 0.5*a_av
a_av = k1*((x_p - x_av) - safety_time_gap*v_av) + k2 * (v_p - v_av)
end
# return the results
return (x_av, v_av, a_av)
end
endtraj_acc (generic function with 2 methods)
function make_plot(data, title, label, xlabel, ylabel)
"""A helper function to make plots
"""
Plots.plot(time_span, data,
title=title,
label=label,
linewidth=3,
markershape = :auto,
linestyle = :auto,
mc= :auto,
xlabel = xlabel,
ylabel = ylabel,
legend=:bottom, legendcolumns=3
)
endmake_plot (generic function with 1 method)
# speed of preceeding vehicles
vps = [traj(t)[1] for t in time_span]
# distance of preceeding vehicles
xps = [traj(t)[2] for t in time_span]
# distance, speed, and acceleration of the acc vehicle
x_av = [traj_acc(t, 1.1)[1] for t in time_span]
v_av = [traj_acc(t, 1.1)[2] for t in time_span]
a_av = [traj_acc(t, 1.1)[3] for t in time_span]
make_plot(
[xps, x_av],
"Distance travelled w.r.t time",
["preceeding" "acc"],
"Time (in seconds)",
"Distance travelled (m)"
)
savefig("/en/blog/2023-02-28-acc_files/acc-01.png")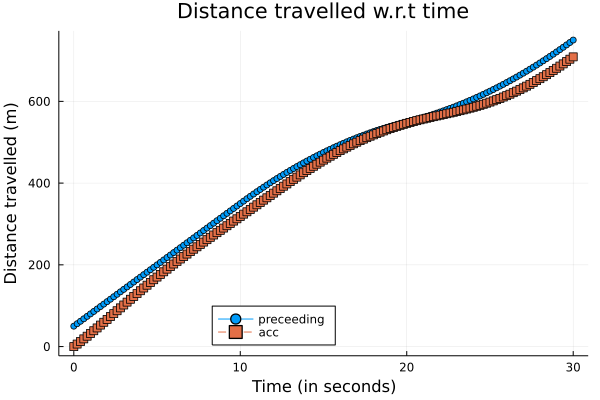
make_plot(
[xps - x_av],
"Gap between proceeding and acc vehicle w.r.t time",
"proceeding position minus acc position",
"Time (in seconds)",
"Gap (m)"
)
savefig("/en/blog/2023-02-28-acc_files/acc-02.png")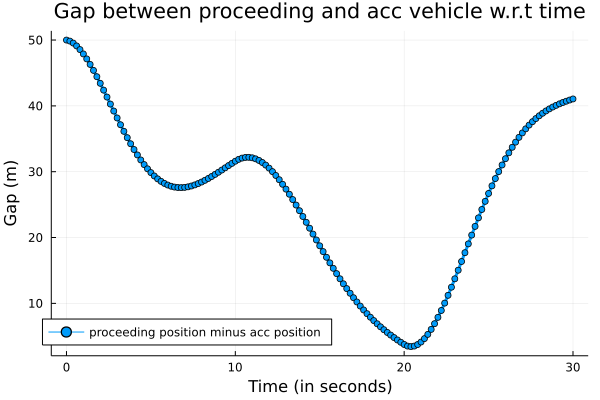
make_plot(
[vps, v_av],
"Speed w.r.t time",
["preceeding" "acc"],
"Time (in seconds)",
"Speed (m/s)"
)
savefig("/en/blog/2023-02-28-acc_files/acc-03.png")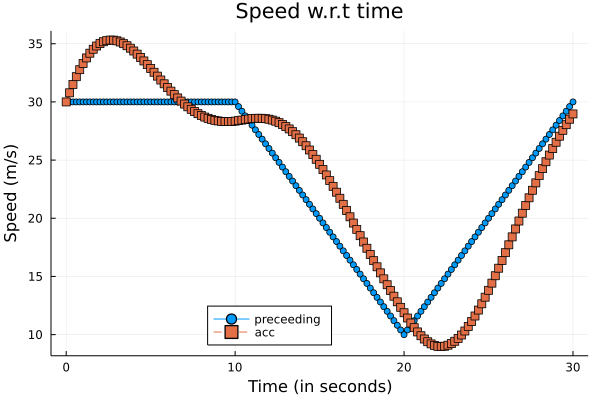
make_plot(
a_av,
"ACC vehicle acceleration w.r.t time",
"acceleration",
"Time (in seconds)",
"Acceleration"
)
savefig("/en/blog/2023-02-28-acc_files/acc-04.png")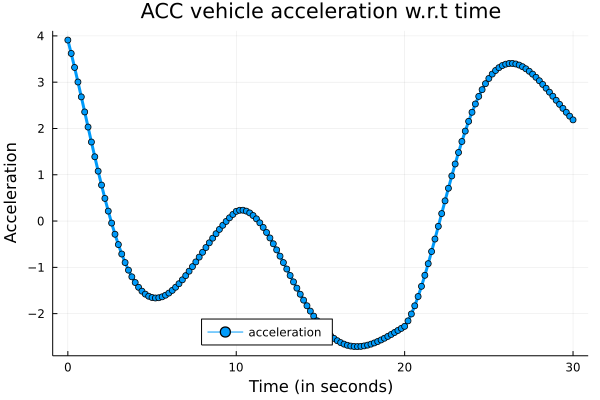
What I do not understand #
- k1, k2
Think about the units. You’ll understand why k1 is $s^{-2}$ and k2 $s^{-1}$
- how to calculate x_av
Use the quadratic function. If the initial velocity is $v1$ and the acceleration is $a$, from t = 0 to t = t, the distance travelled is $v1\cdot t + 0.5\cdot a \cdot t^2$
- responsive planning, how to calculate a_ac
Identify two spots (the initial one and the critical one). Then use two functions to simulate the curves.
- how to always keep the safety time gap
You don’t have to.
- how to get the exact distance (x_av) function w.r.t time for ac? I know probably we need to use calculs again. But it’s difficult because we need v_av in the function of x_av, and we need a_av in the function of v_av. However, we need v_av also in the function of a_av
It’s very difficult to get the analytical form.
#self-drivingLast modified on 2025-06-25 • Suggest an edit of this page